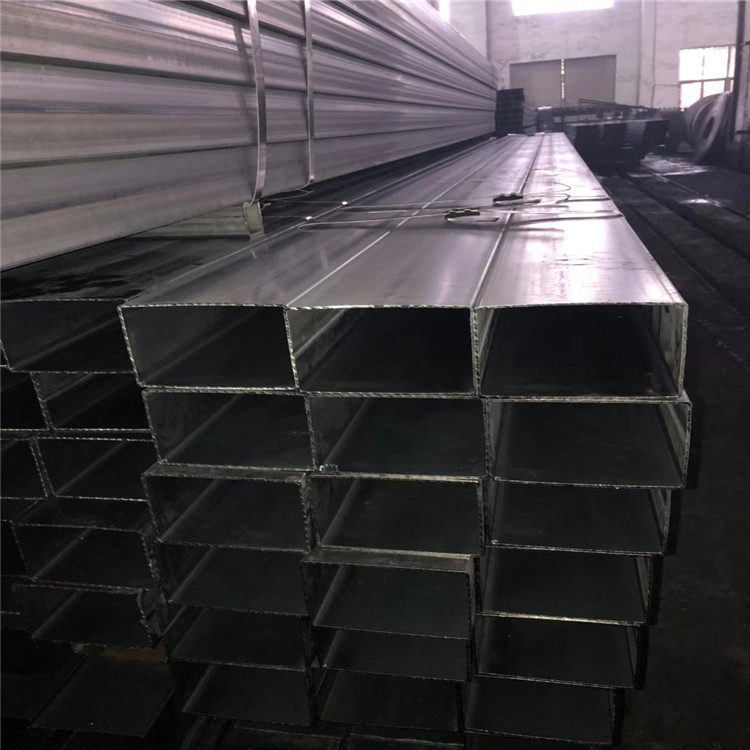
80*80*4方管 固原Q610方管 汽车底盘
80*80*4方管 固原Q610方管 汽车底盘

这个IC集成了电流测量所需的模/数转换器和缓冲放大器。你可以在图1中看到包括故障检测功能和车顺序的附加硬件功能。 ,这个控制IC还集成了一个自带内存的8位微器内核用来执行家用电器工程师规定的其它应用功能。限度的提高每安培电流的电机扭矩输出,使电机的效率。对于表面磁体电机来说,就是控制器将电流(ID)的磁通量分量保持在水平来使电机效率。但是由于IPM电机特别的转子结构,一台IPM电机会产生一个被称为磁阻扭矩的附加扭矩分量。
无锡征图钢业有限公司
热轧精密钢管用连铸圆管坯板坯或初轧板坯作原料,经步进式加热炉加热,高压水除鳞后进入粗轧机,粗轧料经切头、尾、再进入精轧机,实施计算机 控制轧制,终轧后即经过层流冷却和卷取机卷取、成为直发卷。直发卷的头、尾往往呈舌状及鱼尾状,厚度、 宽度精度较差,边部常存在浪形、折边、塔形等缺陷。其卷重较重、钢卷内径为760mm。将直发卷经切头、 切尾、切边及多道次的矫直、平整等精整线后,再切板或重卷,即成为:热轧钢板、平整热轧钢卷、纵切带等产品。热轧精整卷若经酸洗去除氧化皮并涂油后即 成热轧酸洗板卷。(1)合理选材。对精密复杂模具应选择材质好的微变形模具钢(如空淬钢),对碳化物偏析严重的模具钢应进行合理锻造并进行调质热,对较大和无法锻造模具钢可进行固溶双细化热。
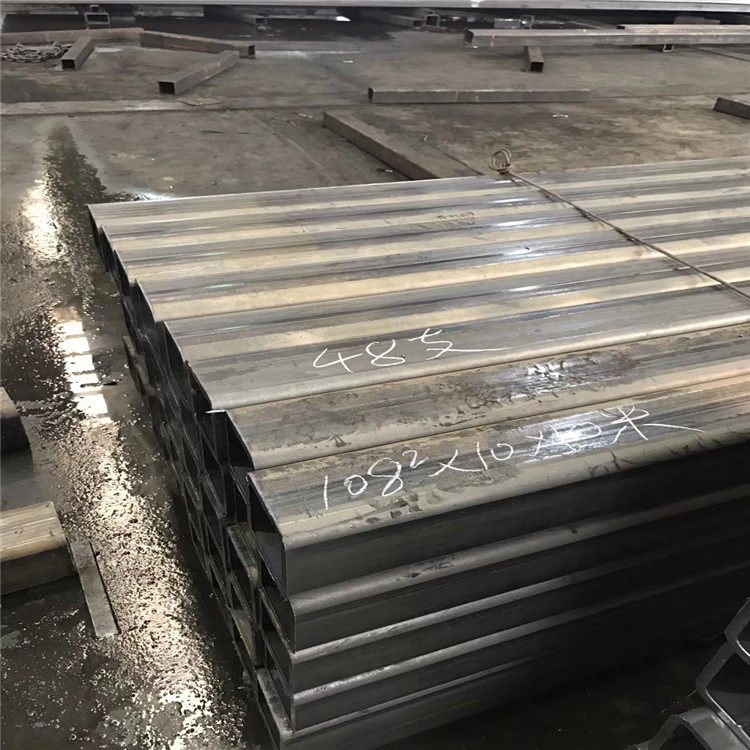
80*80*4方管 固原Q610方管 汽车底盘
在实际工程中常见的破坏形式主要有以下几种:.1撞击破坏当管子振动的振幅大到足以使相邻管子互相撞击,或边缘管不断击打壳体,在管子的撞击部位将产生特有的菱形磨损形式,管壁不断减薄而至 裂。.2挡板损伤为了便于,一般挡板孔较管子直径略大,当挡板较薄时,管子振动会在管壁与挡板孔边缘之间产生较高的接触力,对管子有一种锯割作用,短时间内即可将管子切发生局部失效。.3接头泄漏管子与管板的连接处是换热器中十分重要的结构,然而在工程实际中,由于管子振动使管子与管板连接处受力较大,从而导致胀接或焊接点的损坏,造成泄漏。
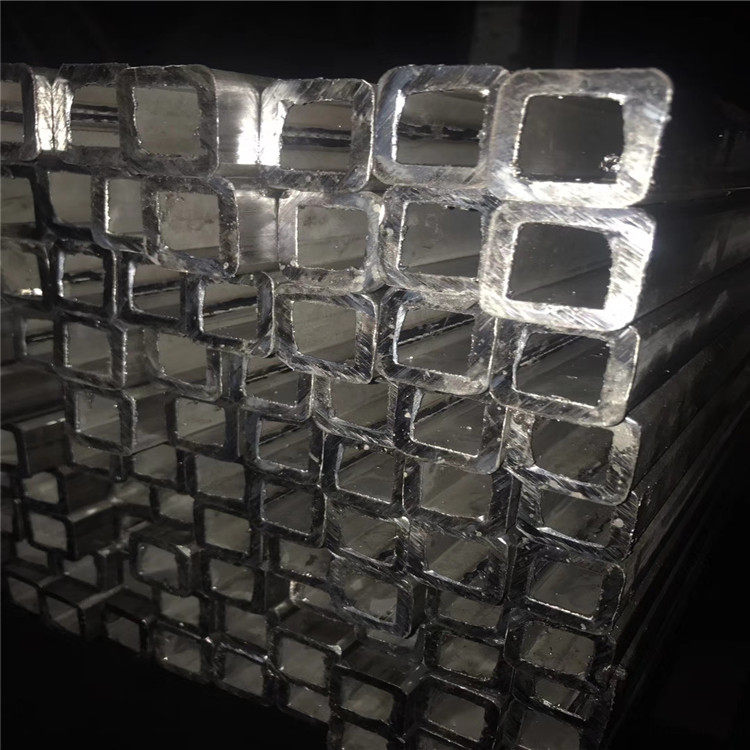
用拉拔方法生产时。金属不但不被切削成铁末。反而可以得到30%的延伸。金属利用率可达95%。(4)能改善成品管金属的机械性能:用拉拔方法生产。使毛坯得到30%以上的塑性变形。由于硬化而使成品管金属的强度限大为提高。一般在成品管内层强度限提高达60%。高精度冷拔管是用无缝热轧方管、直缝焊管为坯料。经过化学后在专用冷拔机上。通过特种变形原理设计的模具进行拉拔。生产出高精度管。其尺寸精度达H10~H8。直线度达0.35~0.5mm/m。表面粗糙度达Ra1.6-0.4。
(2)模具结构设计要合理,厚薄不要太悬殊,形状要对称,对于变形较大模具要掌握变形规律,预留余量,对于大型、精密复杂模具可采用组合结构。
(3)精密复杂模具要进行预先热,消除机械过程中产生的残余应力。
(4)合理选择加热温度,控制加热速度,对于精密复杂模具可采取缓慢加热、预热和其他均衡加热的方法来减少模具热变形。
(5)在保证模具硬度的前提下,尽量采用预冷、分级冷却淬火或温淬火工艺。
(6)对精密复杂模具,在条件许可的情况下,尽量采用真空加热淬火和淬火后的深冷。
(7)对一些精密复杂的模具可采用预先热、时效热、调质氮化热来控制模具的精度。
(8)在修补模具砂眼、气孔、磨损等缺陷时,选用冷焊机等热影响小的修复设备以避免修补过程中变形的产生。
另外,正确的热工艺操作(如堵孔、绑孔、机械固定、适宜的加热方法、正确选择模具的冷却方向和在冷却介质中的运动方向等)和合理的回火热工艺也是减少精密复杂模具变形的有效措施。
正体阀的阀杆移人阀体时,流通面积减小,流量减少。反体阀的阀杆移人阀体时,流通面积增加,流量增加。按阀芯的导向方式不同,调节机构分为顶导向、顶底导向、阀杆导向、阀座导向和阀笼导向等。顶导向调节机构的阀芯导向由上阀盖或阀体内一个导向轴完成;顶底导向调节机构的阀芯由上、下阀盖的导向轴同时定向;阀杆导向是阀盖上一个导向轴与阀座环中心对中,轴套对阀杆进行导向;阀座导向在小流量控制阀中使用,它通过阀座进行导向;阀笼导向调节构的阀芯与阀笼组成套筒结构,在整个行程范围内,阀芯与阀笼内表面接触,在阀笼上有阀笼孔,阀芯时改变阀笼孑L的流通面积。
在设备的维修和清洗等工作中,很有可能发生传感器受到高压水的溅射,误操作引起过载等情况。显然,传感器要在这样的环境条件下长期可靠的运行,是要进行一些特殊设计的。上述基本要求和运行条件可以作为混凝土搅拌楼(站)用称重传感器的选型的依据。凝土搅拌楼(站)用称重传感器选型时需要考虑的几个问题3.1称重传感器载荷容量的确定称重传感器载荷容量通常按下式计算传感器额定载荷=料斗自重+额定称重量(.6~.7)×传感器只数事实上人们在选择传感器容量时往往还要综合考虑冲击载荷的大小以及选定安全系数.安全系数的选择又与传感器的灵敏度有密切关系.常见的应变式称重传感器灵敏度多数为2mV/V,但是也有1mV/V的,如柱式传感器;也有3mV/V的,如部分悬臂梁式传感器和板环式传感器;扭环式传感器则通常是2.85mV/V。